近年來(lái),隨著航空攝影測(cè)量的發(fā)展,特別是無(wú)人機(jī)技術(shù)的飛速發(fā)展,以無(wú)人機(jī)為平臺(tái)的低空攝影測(cè)量得到廣泛應(yīng)用。無(wú)人機(jī)攝影測(cè)量具有操控簡(jiǎn)單、效率高、能及時(shí)地獲取有效的數(shù)據(jù)信息、成本低、受地理環(huán)境影響小等優(yōu)點(diǎn),配合航拍軟件可快速獲取對(duì)地影像,已經(jīng)是現(xiàn)有的3DGIS、航天、航空遙感和地面遙感系統(tǒng)不可缺少的彌補(bǔ)手段。無(wú)人機(jī)攝影測(cè)量在近幾年發(fā)展勢(shì)頭日漸迅猛,與此同時(shí),如何提高無(wú)人機(jī)攝影測(cè)量的成圖精度,同時(shí)如何在保證成果精度的同時(shí)減少布設(shè)像控點(diǎn)工作量等問(wèn)題也備受人們關(guān)注。
像控點(diǎn)布設(shè)是航空攝影測(cè)量中的重要環(huán)節(jié),但是由于無(wú)人機(jī)質(zhì)量輕以及外界因素的影響,無(wú)人機(jī)在作業(yè)過(guò)程中姿態(tài)不穩(wěn)定,獲取的影像存在重疊率不規(guī)則和影像傾角過(guò)大等特點(diǎn),因此無(wú)人機(jī)地面像控點(diǎn)的數(shù)量和分布和以往的傳統(tǒng)航空測(cè)量的要求有所不同。近年來(lái),有很多學(xué)者展開了提高無(wú)人機(jī)測(cè)圖精度的研究。
本文使用FD-130B六旋翼無(wú)人機(jī)采集了沿海某村莊影像,通過(guò)分析不同的像控點(diǎn)數(shù)量及分布與無(wú)人機(jī)航測(cè)成果質(zhì)量之間的關(guān)系,分析驗(yàn)證了像控點(diǎn)數(shù)量及分布與空中三角測(cè)量、數(shù)字正射影像圖(DOM)、數(shù)字高程模型(DEM)之間的關(guān)系,研究了無(wú)人機(jī)航測(cè)大比例尺地圖所需控制點(diǎn)數(shù)量及分布,為無(wú)人機(jī)在航空攝影測(cè)量中滿足成圖需求提供有效參考。
1、研究數(shù)據(jù)
1.1 研究區(qū)域
研究區(qū)域位于沿海地區(qū)浙江省寧波市象山縣石浦鎮(zhèn)樹橋頭村,總面積約0. 4 km2,居民樓大多都是二三層樓房,交通便利,地勢(shì)平坦,建筑物較密集,沿街道建設(shè)。
1. 2影像數(shù)據(jù)及像控點(diǎn)信息
影像數(shù)據(jù)獲取使用富地FD-130B六旋翼無(wú)人機(jī)(如圖1所示)飛行平臺(tái),最大載荷為5 kg,云臺(tái)可以搭載各種快拆式傳感器,本次實(shí)驗(yàn)無(wú)人機(jī)搭載FD-5120傾斜相機(jī)進(jìn)行影像采集,機(jī)身裝置4塊容量為22 000 mA蓄電池,有效作業(yè)時(shí)間30分鐘,POS數(shù)據(jù)定位精度水平精度小于±0. 10 m,垂直精度小于±0. 10 m。采用常規(guī)RTK測(cè)量模式進(jìn)行像片控制點(diǎn)采集,平面和高程精度均優(yōu)于±0.01 m,像片控制點(diǎn)共33個(gè),坐標(biāo)系統(tǒng)為地方獨(dú)立平面坐標(biāo)系和1985國(guó)家高程基準(zhǔn)。

1. 3航攝參數(shù)
該飛行區(qū)域面積約為0 . 4 km2,根據(jù)任務(wù)需要以及《低空數(shù)字航空攝影測(cè)量外業(yè)規(guī)范》的相關(guān)要求,航向重疊率設(shè)置80%,旁向重疊率設(shè)置為80%,相對(duì)航高為75 m,航線為南北方向,共飛行3架次,下視鏡頭獲得1496張影像。
2、像控點(diǎn)布設(shè)方案
像控點(diǎn)是無(wú)人機(jī)攝影測(cè)量解析空三加密和測(cè)圖的基礎(chǔ),用于空中三角測(cè)量(空三加密)或直接用于測(cè)圖定向的像片控制點(diǎn),其位置的選擇、平面位置和高程的測(cè)定直接影響到內(nèi)業(yè)成圖的精度。像片控制測(cè)量的布點(diǎn)方案分為:全野外布點(diǎn)方案、非全野外布點(diǎn)方案和特殊情況的布點(diǎn)方案,本次實(shí)驗(yàn)采用非全野外布點(diǎn)方案和無(wú)人機(jī)航測(cè)像控布設(shè)在飛行前布設(shè)的方法。
2. 1像控點(diǎn)的選點(diǎn)
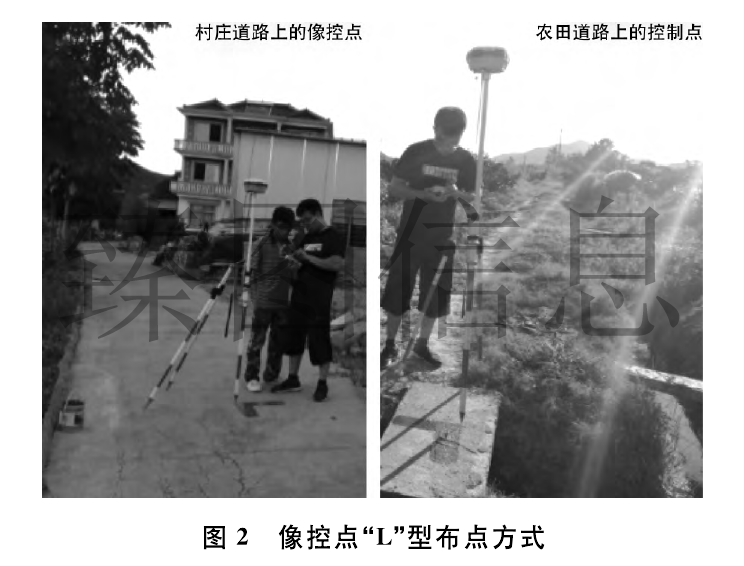
為保障數(shù)據(jù)成果精度,像控點(diǎn)應(yīng)該選擇在航攝像片上影像清晰、目標(biāo)明顯的像點(diǎn),保證后期刺點(diǎn)方便、準(zhǔn)確,實(shí)地布點(diǎn)時(shí),對(duì)于地形不平坦、水系等以及航攝時(shí)像控點(diǎn)區(qū)域可能變化的地方,會(huì)影響空三內(nèi)業(yè)刺點(diǎn)誤差,均不能用作像控點(diǎn)。因?yàn)檠芯繀^(qū)域地勢(shì)平坦,地形起伏不大,但只有中間區(qū)域是村莊,大部分區(qū)域是農(nóng)田,所以航攝區(qū)域合適的像控點(diǎn)很少,為提高刺點(diǎn)精度,保證成圖精度,在航攝前在村莊和農(nóng)田中的道路上采用刷油漆的方式提前布置像控點(diǎn)標(biāo)志,標(biāo)志為“L”型,如圖2所示。
2. 2像控點(diǎn)布設(shè)方案
從像控點(diǎn)布設(shè)的一般原則上來(lái)講,像控點(diǎn)應(yīng)該立體、均勻的分布在攝區(qū)內(nèi),并且要加強(qiáng)測(cè)區(qū)邊緣的控制,并且兼顧中部控制,點(diǎn)位不能分布在近似一條直線或者近似平面內(nèi),在遵循像控點(diǎn)布設(shè)的一般原則的基礎(chǔ)上,由于該研究區(qū)域?qū)儆谄教箙^(qū)域,像控點(diǎn)的選擇僅根據(jù)均勻分布的原則,未過(guò)多考慮地形因素。設(shè)計(jì)了9種控制點(diǎn)布設(shè)方案,如圖3所示:
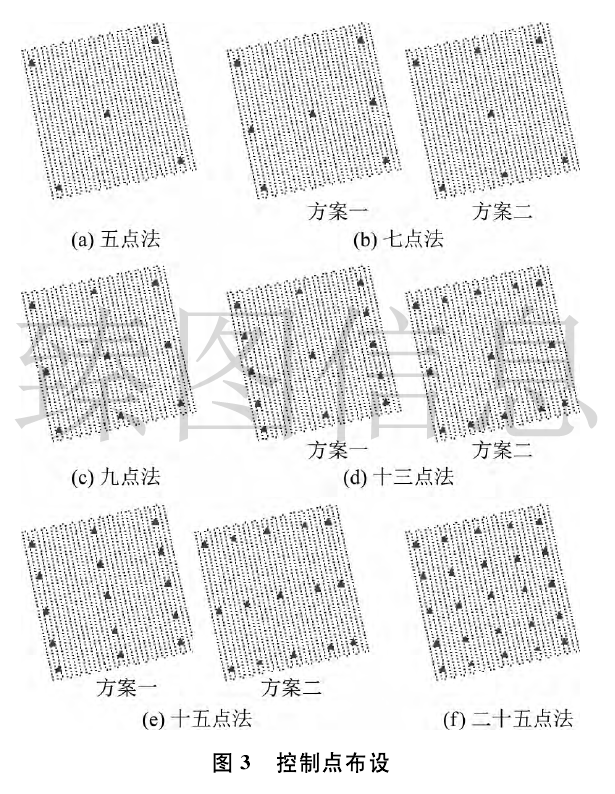
(1)五點(diǎn)法,在近似正方形的研究區(qū)域四個(gè)角分別選取一個(gè)點(diǎn)作為像控點(diǎn)且在研究區(qū)域中心選取一點(diǎn),共5個(gè)點(diǎn)作為像控點(diǎn),進(jìn)行加密解算,如圖3(a)所示。
(2)七點(diǎn)法,在五點(diǎn)法的基礎(chǔ)上分別沿航線方向和垂直航線方向在兩像控點(diǎn)之間增加兩個(gè)點(diǎn),如圖3(b)所示。
(3)九點(diǎn)法,在五點(diǎn)法的基礎(chǔ)上沿航線方向和垂直航線方向在兩像控點(diǎn)之間增加四個(gè)點(diǎn),如圖3(c)所示。
(4)十三點(diǎn)法,在九點(diǎn)法的基礎(chǔ)上分別沿航線方向和垂直航線方向像控點(diǎn)之間增加四個(gè)點(diǎn),如圖3(d)所示。
(5)十五點(diǎn)法,在九點(diǎn)法的基礎(chǔ)上分別沿航線方向和垂直航線方向像控點(diǎn)之間增加六個(gè)點(diǎn),如圖3(e)所示。
(6)二十五點(diǎn)法,在九點(diǎn)法的基礎(chǔ)上沿航線方向和垂直航線方向像控點(diǎn)之間增加十六個(gè)點(diǎn),如圖3 (f)所示。
3、數(shù)據(jù)處理
目前測(cè)繪領(lǐng)域里使用無(wú)人機(jī)處理航空影像的成圖軟件非常多,如Bentley ContextCap-ture、Pix4D、APS、Agisoft PhotoScan等智能的全自動(dòng)航空影像后處理軟件,使用無(wú)人機(jī)航拍獲取的影像數(shù)據(jù)在這些軟件中可以快速生成數(shù)字高程模型、正射影像圖和三維模型等數(shù)據(jù)產(chǎn)品。Bentley ContextCapture可以通過(guò)簡(jiǎn)單的照片生成具有高分辨率的真實(shí)三維模型,Pix4D、 APS、 Agisoft PhotoScan等軟件自動(dòng)化的工作流程操作非常簡(jiǎn)單,可進(jìn)行深度、復(fù)雜的數(shù)據(jù)處理,生成高分辨率DEM和正射影像圖等數(shù)字成果。
本文數(shù)據(jù)使用AgisoftPhotoScan軟件處理生成DEM和正射影像,PhotoScan是俄羅斯Agisoft公司研發(fā)的基于影像自動(dòng)生成高質(zhì)量三維模型的軟件,自動(dòng)化程度高,操作簡(jiǎn)便,GPU加速,處理過(guò)程更快捷,精度高,成果詳細(xì)。
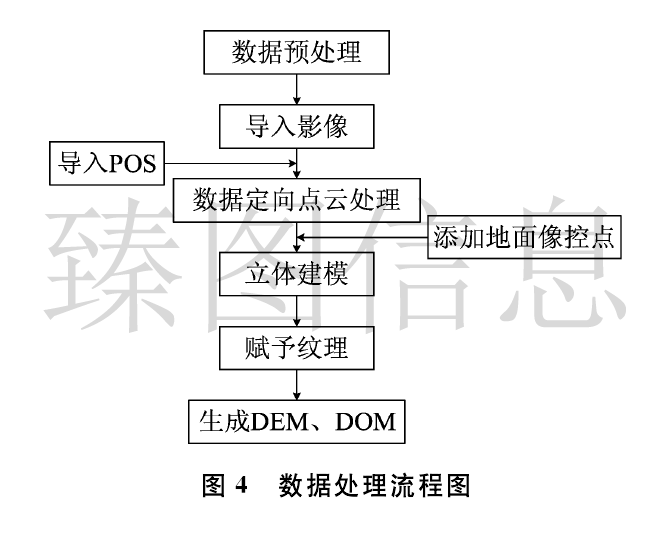
將影像和對(duì)應(yīng)POS數(shù)據(jù)導(dǎo)入PhotoScan工程中,對(duì)齊照片,使用多視圖三維重建技術(shù)從重疊影像中估算出每張影像曝光瞬間相機(jī)的位置和匹配點(diǎn)形成的稀疏點(diǎn)云的位置;優(yōu)化照片對(duì)齊方式之前需要刺點(diǎn),這是唯一需要手動(dòng)操作的,為了保證刺點(diǎn)精度,每個(gè)控制點(diǎn)必須在多個(gè)影像上刺出;進(jìn)行密集匹配,建立密集點(diǎn)云,根據(jù)實(shí)驗(yàn)?zāi)康暮碗娔X配置,本次數(shù)據(jù)處理生成中等密度點(diǎn)云;根據(jù)密集點(diǎn)云生成網(wǎng)格;賦予紋理;生成數(shù)字高程模型(DEM)和正射影像。每個(gè)像控點(diǎn)布設(shè)方案數(shù)據(jù)處理流程如圖4所示。
4、試驗(yàn)結(jié)果分析
4.1 精度評(píng)定標(biāo)準(zhǔn)
無(wú)人機(jī)影像處理完成后,利用像控點(diǎn)和檢查點(diǎn)對(duì)成果進(jìn)行精度評(píng)定,將生成的數(shù)字正射影像和數(shù)字高程模型導(dǎo)入ZTMAPGIS,在數(shù)字正射影像找到像空點(diǎn)位置并提取各點(diǎn)的平面坐標(biāo),將各點(diǎn)的平面坐標(biāo)導(dǎo)入數(shù)字高程模型,提取對(duì)應(yīng)的高程信息。以RTK實(shí)測(cè)的坐標(biāo)數(shù)據(jù)和空三加密后提取坐標(biāo)數(shù)據(jù),計(jì)算9個(gè)方案的平面和高程中誤差,對(duì)比分析9個(gè)方案的精度,中誤差計(jì)算公式為:
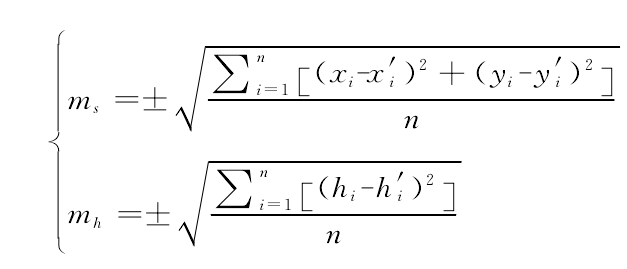
上式中xi,yi,hi為第i個(gè)像控點(diǎn)在正射影像中提取出的坐標(biāo)值,xi′,yi′,hi′第i個(gè)像控點(diǎn)實(shí)測(cè)坐標(biāo),n表示像控點(diǎn)的個(gè)數(shù)。
無(wú)人機(jī)獲取的影像成果精度評(píng)定的標(biāo)準(zhǔn)分為三部分,空中三角測(cè)量精度、成果分辨率和成果測(cè)圖精度。
4. 2空中三角測(cè)量精度分析
根據(jù)中誤差計(jì)算公式,結(jié)合方案中的像控點(diǎn),計(jì)算各個(gè)試驗(yàn)的平面中誤差,高程中誤差,如表1所示。
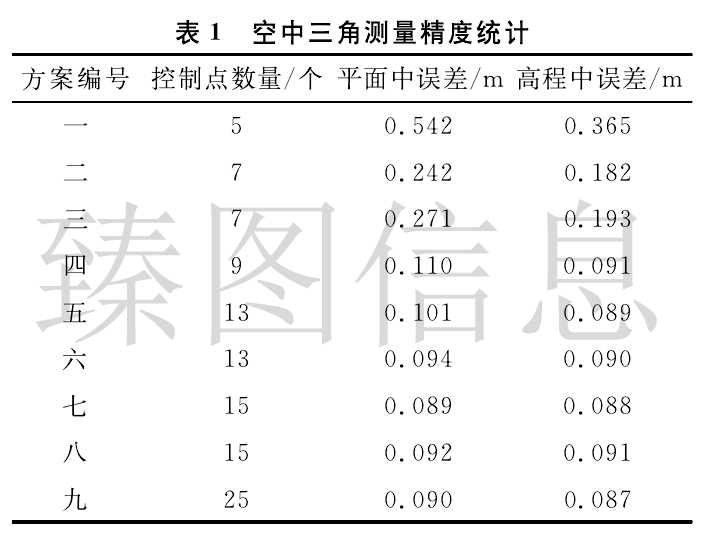
從表1可以看出除方案一、二、三外,其他試驗(yàn)的平面中誤差和高程中誤差的精度均滿足1:500、1:1000、1:2000比例尺數(shù)字航空測(cè)量空中三角測(cè)量規(guī)范中測(cè)圖精度的要求。方案二、三精度滿足1:1000、1:2000比例尺數(shù)字航空測(cè)量空中三角測(cè)量規(guī)范中測(cè)圖精度的要求,方案一只滿足1:2000精度要求。
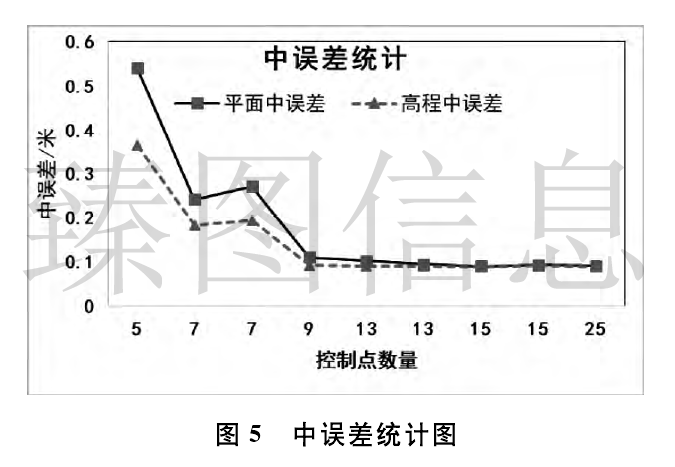
隨著控制點(diǎn)的數(shù)量增加,當(dāng)平面中誤差和高程中誤差精度趨于穩(wěn)定時(shí)(圖5),精度都在同一量級(jí),說(shuō)明空中三角測(cè)量精度和控制點(diǎn)數(shù)量和布設(shè)方案有關(guān),但控制點(diǎn)增加到一定數(shù)量時(shí),精度不再明顯提高。
4. 3 DOM和DEM成果精度分析
本次試驗(yàn)得到的成果分辨率均接近1.50cm/pix,所以分辨率滿足基礎(chǔ)地理信息成果1:500、1:1000、1:2000數(shù)字高程模型精度要求和基礎(chǔ)地理信息成果1:500、1:1000、1:2000數(shù)字正射影像成圖分辨率。以檢查點(diǎn)坐標(biāo)平面中誤差和高程中誤差評(píng)價(jià)無(wú)人機(jī)影像生成的DOM和DEM數(shù)據(jù)精度,計(jì)算結(jié)果見表2。
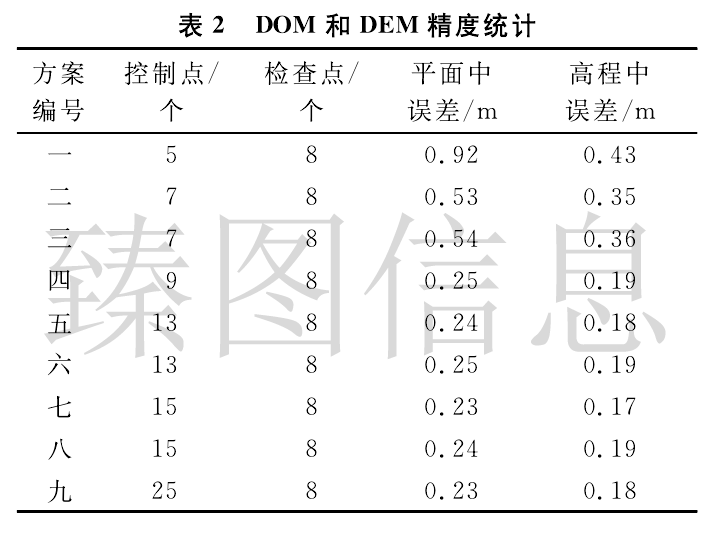
由表2可以看出,方案一、二、三生成的正射影像精度誤差比較大,不能滿足規(guī)范要求,其他方案生成的正射影像精度均滿足基礎(chǔ)地理信息成果1:500、1:1000、1:2000數(shù)字正射精度要求。
方案一生成的DEM高程精度不能達(dá)到基礎(chǔ)地理信息成果1:500、1:1000數(shù)字高程模型精度要求,方案二、三不滿足1:500數(shù)字高程模型精度,方案四到九生成的DEM均符合基礎(chǔ)地理信息成果1:500、1:1000、 1:2000數(shù)字高程模型精度要求。
根據(jù)像控點(diǎn)布點(diǎn)多少和位置的不同對(duì)數(shù)據(jù)成果精度的影響,可以看出,當(dāng)控制點(diǎn)很少時(shí),不能滿足1:500、1:1000、1:2000比例尺數(shù)字航空測(cè)量空中三角測(cè)量規(guī)范中測(cè)圖精度的要求和基礎(chǔ)地理信息成果1:500、1:1000、1:2000數(shù)字成果精度要求,但控制點(diǎn)個(gè)數(shù)到一定數(shù)量時(shí),精度趨于一定值。控制點(diǎn)相同時(shí),沿航線方向均勻分布在測(cè)區(qū),位置不一樣,精度差值在毫米級(jí),相比較與精度標(biāo)準(zhǔn),對(duì)精度影響不是很明顯。
5、結(jié)束語(yǔ)
通過(guò)此次試驗(yàn),設(shè)計(jì)不同的像控點(diǎn)方案,驗(yàn)證了無(wú)人機(jī)在不同的像控點(diǎn)數(shù)量和分布時(shí)成圖的精度可以滿足1:500、1:1000、1:2000比例尺數(shù)字航空測(cè)量規(guī)范要求,分析空三測(cè)量精度、DEM和正射影像與像控點(diǎn)數(shù)量及分布之間的關(guān)系,為無(wú)人機(jī)攝影測(cè)量提供有效參考。結(jié)論如下:
(1)當(dāng)像控點(diǎn)數(shù)量足夠多且均勻沿航線分布時(shí),無(wú)人機(jī)生成的數(shù)字成果滿足基礎(chǔ)地理信息1:500、1:1000、1:2000數(shù)字成果精度要求。
(2)無(wú)人機(jī)數(shù)字成果精度隨著像控點(diǎn)數(shù)量增加而增加,但到一定界限時(shí),隨著像控點(diǎn)增加,精度趨于穩(wěn)定。